
アグリストは「100年先も続く持続可能な農業の実現」をビジョンに掲げ、ピーマンときゅうりの自動収穫ロボットを開発するスタートアップ企業です。
2017年に地元農家らが開催していた「儲かる農業研究会」で農業課題の解決と収穫ロボット開発の要望を受け、2019年の創業からピーマンの自動収穫ロボットの開発に取り組んできました。
宮崎県は「きゅうり」と「ピーマン」の一大産地。アグリストがオフィスを構える児湯郡は、県内でも有数の主産地です。
ロボット概要
ピーマン自動収穫ロボット「L」の特徴
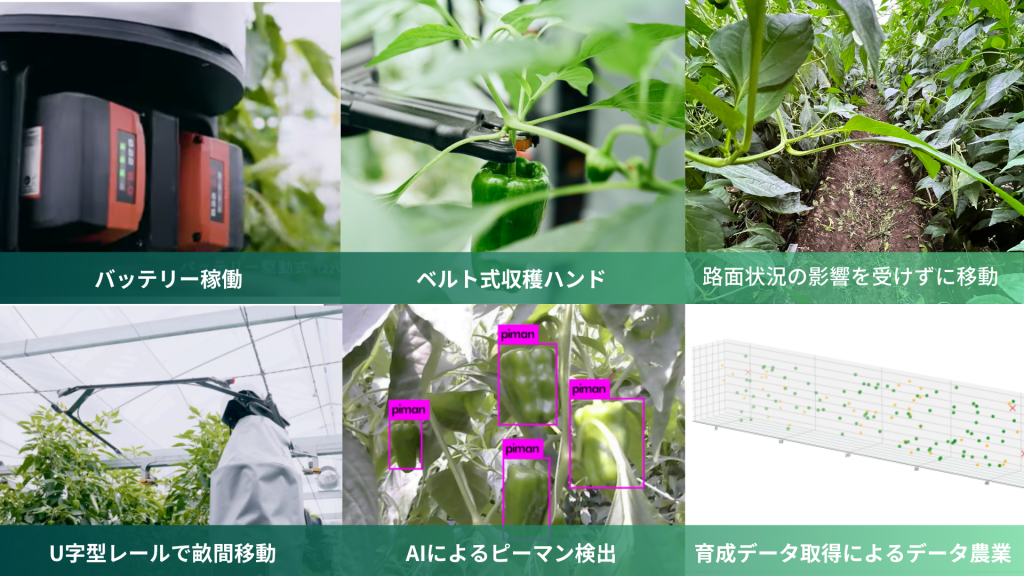
- 吊り下げ式で移動することで路面状況の影響を受けない ※従来型の農法・農場でも導入可能
- 端部ではU字型レールで隣の列へ移動
- AIにより収穫適期のピーマンを画像から検出
- 独自開発のベルト式収穫ハンド(特許取得済み)でピーマンを収穫
- 1分間に1個、1日20キロ、年間約4トンを収穫する想定 ※2022年7月時点、昼間稼働、環境に条件有
- 重量は約19キロ
- ロボットの収穫ボックスがピーマンでいっぱいになるとあらかじめハウス内に設置したコンテナへピーマンを放出
- 連続稼働時間 約8時間 ※環境によって変動、バッテリー交換により延長可能
アグリストのピーマン自動収穫ロボット「L」はハウス内に張り巡らされたワイヤーをロープウエイのように吊り下げられながら空中移動していきます。土壙ハウス内のぬかるみや剪定後の枝葉、加温用のダクトといった路面状況の影響を受けずに移動することができます。また、協力農家の意見を参考に独自開発した収穫ハンドは、2本のベルトを使って茎を巻き込みながら収穫します。ベルト巻き込み式で収穫することで、ロボット本体が多少揺れてもベルトに茎が少しでも触れれば収穫動作を行うことが可能です。
また、ロボットの動力源には4つのバッテリーを搭載する形式を採用し、バッテリー交換を行うことで8時間以上の連続稼働を可能とします。
技術的に実現可能な 今後の可能性
- ピーマンの3Dマップを生成することで育成データを取得し栽培管理へフィードバック
- 夜間収穫
- 遠隔収穫
- 実の位置や大きさ等のデータ収集をすることで収量予想
- 病害虫の早期発見
ロボットがハウス内を巡回することで集めたデータを栽培管理へフィードバックすることでデータ農業を可能にします。
※現在ロボット単体の販売は行っておりません。ロボットとハウス・栽培方法をセットで販売しております。
関連プレスリリース‐https://agrist.com/archives/6623
※その他のご質問はコンタクトフォームよりお問い合わせください

ロボット仕様・導入可能ハウスについて
| 重量 | 19㎏ |
| サイズ | W1,084×D280×H1,234mm |
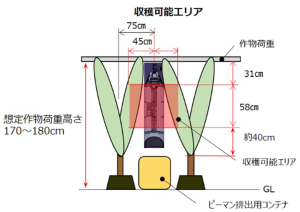
| アーム可動域(垂直) | 作物荷重下面から31cmの位置から下に58cmのエリア |
| アーム可動域(水平) | ロボット中心から半径900mm |
| 電源 | バッテリー(交換式) 18V 24Ah(6Ah×4個) |
| 充電時間 | 約1時間 |
| かご交換 | 手動 |
| 畝間移動 | 手動 ※一部の畝は自動で移動 |
| 収穫性能 | 1~3分/個 ※実の量により前後します |
| 移動スピード | [実が多い(収穫が遅れている)状態] 2.5時間/列 [実が適量(通常の収穫)状態] 1時間/列 ※1列50m(片側のみ収獲)想定 |
| 連続稼働時間 | 昼8時間 ※実の量により前後します |
| 1日の収穫量 | [実が多い(収穫が遅れている)状態] 20kg/日 [実が適量(通常の収穫)状態] 14kg/日 ※実のサイズにより重量は前後します |
ハウス仕様
| ハウス間口 | 5.4m ※宮崎県で標準的な間口の低コスト耐候性ハウスを想定 |
| ハウス骨材 | □50㎜ t 2.0㎜以上 |
| 作物荷重高さ | 1,700~1,800㎜(推奨)~1,900㎜(上限) |
| 畝数 | 3畝 |
| 畝間 | 1,500~1,600㎜ |
| 仕立て方 | 4本仕立て(誘引用針金間隔:600~900㎜程度) |
| その他 | ・ワイヤ設置位置(通路上)の作物荷重に循環煽、電源BOX、CO2ダクト等が無いこと ・妻側通路にスペースがあること ・剪定が行きとどいていること ※2~3節切り戻し 人が通路を歩いても枝を折らないレベル ・ロボットがハウス内にある状態でのミスト(薬散)、硫黄燻煙は控えて下さい |
▼視察詳細についてはこちら
ロボット開発の背景
「生産をしても収穫をする人がいない」
「収穫できないと着果負担により木が弱ってしまう」
「先駆的な農機具は高すぎて買えない」
日本の農家の平均年齢は68歳と高齢化が進んでいます。2030年には農業従事者が半減するとのデータもでています(日本農業情報システム協会より)。アグリストは農作業の50%を占める収穫作業がボトルネックな労働集約型の農業を変革するために、ロボット開発をはじめました。
(2024年1月修正)