
アグリストは「100年先も続く持続可能な農業の実現」をビジョンに掲げ、ピーマンとキュウリの自動収穫ロボットを開発するスタートアップ企業です。
2017年に地元農家らが開催していた「儲かる農業研究会」で農業課題の解決と収穫ロボット開発の要望を受け、2019年の創業からピーマンの自動収穫ロボットの開発に取り組んできました。
宮崎県は「キュウリ」と「ピーマン」の一大産地。アグリストがオフィスを構える児湯郡は、県内でも有数の主産地です。
ロボット概要
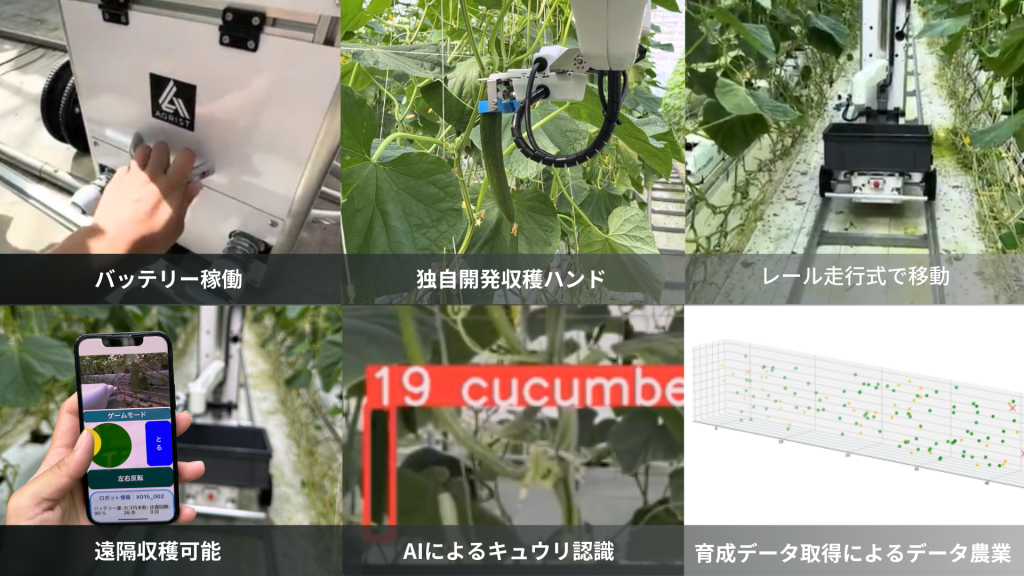
キュウリ収穫ロボットの特徴
- レール走行式で移動することで安定的に移動 ※導入条件有
- AIにより収穫適期のキュウリを画像から検出
- 独自開発の収穫ハンド(特許申請中)でキュウリを収穫
- 0.3個/分 ※2023年10月時点、昼間稼働、環境に条件有
- 重量は約60キロ
- キュウリをハンド部で吸着し、きゅうりを掴みながらはさみで果柄をカットする
- コンテナへ置く際に角度をつけて折れないよう優しく置く
- ネット環境を整えると遠隔収穫可能
- 収穫閾値、収穫サイズ設定が可能
- 連続稼働時間 約10時間 ※環境によって変動、バッテリー交換により延長可能
AGRISTのキュウリ収穫ロボットはレール走行式で移動しながら収穫していきます。つるおろし栽培を行っている大規模施設園芸のビニールハウスの中での導入を条件としています。また、独自開発した収穫ハンドはキュウリをつかんだ場合のみ収穫動作を行います。
また、ロボットの動力源には1つのバッテリーを搭載し、バッテリー交換を行うことで10時間以上の連続稼働を可能とします。※夜間収穫機能は未開発
技術的に実現可能な今後の可能性
- 作物の3Dマップを生成することで育成データを取得し栽培管理へフィードバック
- 夜間収穫
- 遠隔収穫
- 実の位置や大きさ等のデータ収集をすることで収量予想
- 病害虫の早期発見
ロボットがハウス内を巡回することで集めたデータを、栽培管理へフィードバックしデータ農業を行います。
※ロボットの販売・レンタルについてはお問い合わせください。

ロボット仕様・導入可能ハウスについて
| 重量 | 60㎏ |
| サイズ | ①D760×H1,520mm×W1,110 ②D760×H1,820mm×W1,110 |
| アーム可動域(垂直) | ①地面から400-1,250mm ②地面から700-1,550mm |
| アーム可動域(水平) | ロボット中心から半径900mm |
| 電源 | バッテリー(交換式) 25.2V 23.7Ah |
| 充電時間 | 約5時間 |
| 畝間移動 | 手動 |
| 収穫性能 | 1本/分* |
| 移動速度 | 3-10(cm/s) |
| 連続稼働時間 | 約10時間 (ただし畝間移動は手動) |
| 通知機能 | 不具合発生、稼働完了時スマホへ通知 |
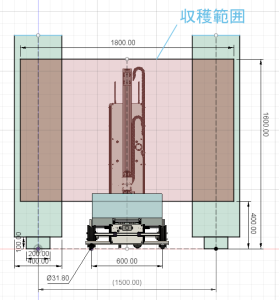
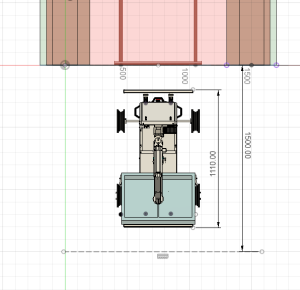
ハウス仕様
| レールが設置してあり、平らであること |
| レール間距離:600mm |
| レール径:Φ31.8mm or Φ48.6mm |
| 畝間:1,500~1,600mm |
| 畝から出た後の通路が平らであること(コンクリート) |
| 畝から出た後の通路幅:約1,500mm以上 |
| 栽培方式:つる下ろし栽培 |
| 主枝が通路(レール上)に突出していないこと |
| 葉かきができていること |



▼視察詳細についてはこちら
ロボット開発の背景
「生産をしても収穫をする人がいない」
「収穫できないと着果負担により木が弱ってしまう」
「先駆的な農機具は高すぎて買えない」
日本の農家の平均年齢は68歳と高齢化が進んでいます。2030年には農業従事者が半減するとのデータもでています(日本農業情報システム協会より)。アグリストは農作業の50%を占める収穫作業がボトルネックな労働集約型の農業を変革するために、シンプルな構造で安価なロボット開発をはじめました。
関連プレスリリース
‐福島での遠隔収穫体験について https://agrist.com/archives/6951
‐キュウリ収穫ロボット現場導入について https://agrist.com/archives/6662
※その他のご質問はコンタクトフォームよりお問い合わせください
※キュウリ収穫ロボット開発拠点‐つくばオフィス
(2025年7月修正)