
今後は収穫率 約40%を60%まで向上へ
AGRISTのつくばオフィス キュウリ収穫ロボット プロダクトリーダー 清水秀樹と設計開発リーダー 増渕武を中心に、9月に株式会社タカミヤの愛菜羽生農場で、キュウリ収穫ロボットの導入を実施しました。
▼参考プレス
https://prtimes.jp/main/html/rd/p/000000095.000050444.html

キュウリ収穫ロボットとは
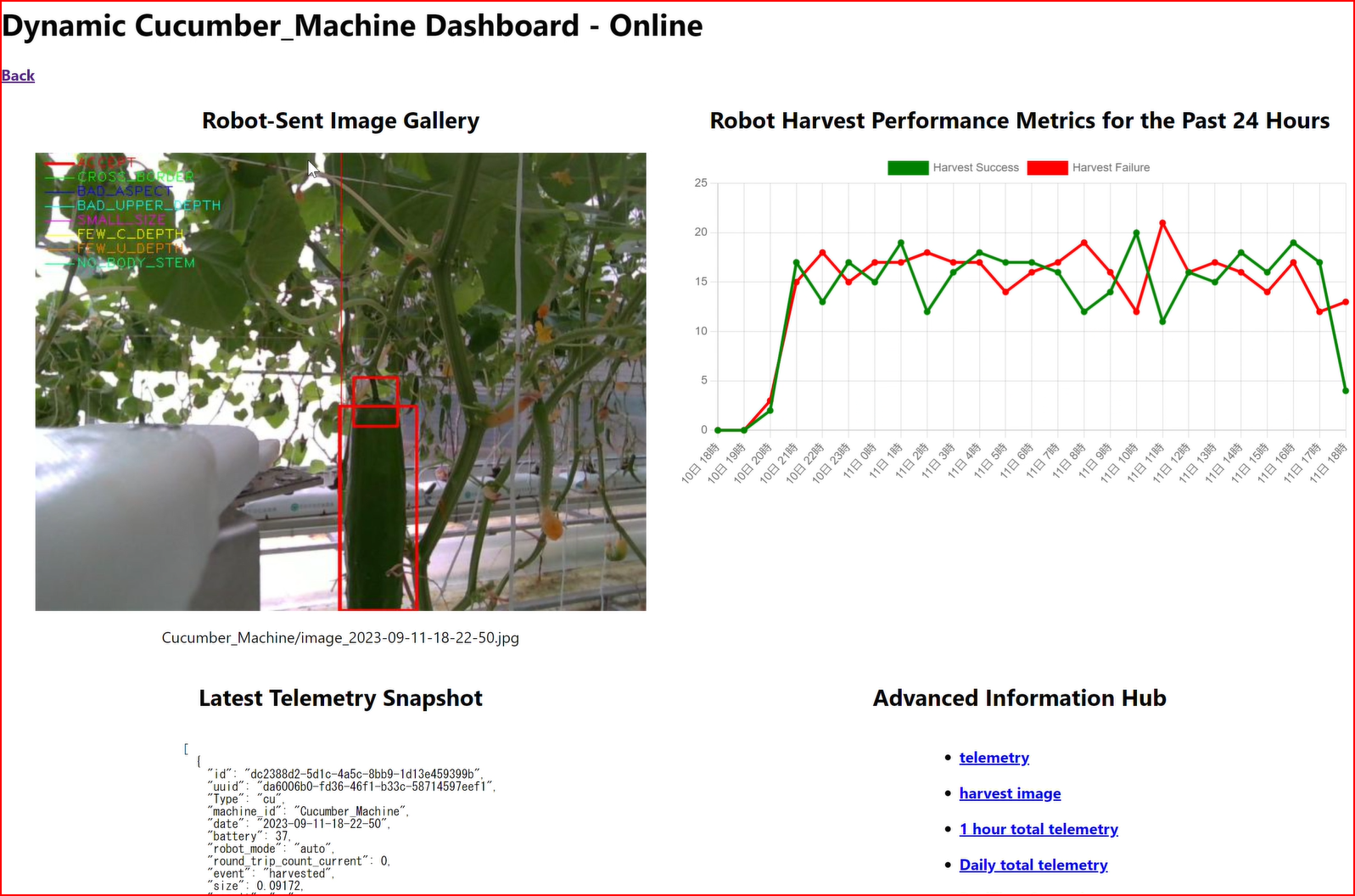
キュウリ収穫ロボットは、ピーマンの収穫ロボット開発で培った技術を応用し開発しました。このロボットは1本100グラム以上のキュウリをより多く収穫するために、安定性の高いレール走行式モデルで移動します。また、ロボットに搭載されたカメラから作物を認識し、AIが大きさを判断し収穫動作を行います。収穫ハンドには吸引タイプの収穫ハンドを採用し、栽培環境や作物を傷つけずに収獲する機能を搭載しています。
今後は、収穫の際に使用するカメラを用いて、農作物の状態をモニタリングしながら巡回することで、今まで人の勘や経験に頼っていた部分を可視化し、再現可能な農業を実現していきます。
▼キュウリ収穫ロボット詳細はこちら
ソフトウエアの更新を現場で行いスピード感のある進化へ
また、実際の現場との連携を利用した集中的な開発を同時に行い、今回の導入で気づいた改善点はすぐに修正しました。当初のキュウリ探索方法は、移動動作と探索動作が別々に動き、左右の畝の収穫を3往復で行っていました。改善後は、1往復で移動しながら探索するよう改善ができ、大幅な時間短縮へとつながりました。
開発者コメント:運用と効率化の最適解で農業の質と効率を向上させる

キュウリ収穫ロボット 設計開発リーダー 増渕武(ますぶちたける)
9月からタカミヤ様にキュウリ収穫ロボットを導入して頂きました。開発者として、まずは大きな問題も無くロボットが動き続けていることにほっとしています。
また、圃場で実際にロボットがキュウリを収穫している姿を見ると、ようやく最初の一歩が踏み出せたなと感じています。収穫ロボットは収穫の手助けになるだけではなく、データの収集や遠隔地から圃場内の見回り等、ロボットの導入によって実現できることは多岐にわたり、農業の質と効率を大きく向上させることが出来ます。一方で、人とロボットが共に作業を進める上で、どのように運用すれば最も効率が良いのかといった運用面での課題も存在します。
今後も実際の圃場でのロボット運用を通して、人とロボットにとってそれぞれ最適な形を模索し、人とロボットが協働する新たな農業の形を創り上げていければと思っております。
開発者コメント:これから活躍するのは人と共存するロボット

キュウリ収穫ロボット プロダクトリーダー兼テックリードコメント 清水秀樹(しみずひでき)
9月からキュウリ収穫ロボットを導入致しました。実証実験を行っていたころから、収穫性能や収穫スピードを大きく向上させ、さらに1回の充電で10時間動かすことが可能です。さらにこのロボットは収穫だけでなく、Microsoft azureを活用したデータの蓄積基盤との連携も可能とし、スマホを活用しながら日々の収穫データを可視化分析することができます。
ここまでの道のりは決して簡単ではありませんでした。開発期間は約2年間で、何度も思考錯誤を加え作り変えること3回目で、ようやく世に出せるレベルになりました。
現在の収穫率は40%以上です。この数字を見て少ないと感じられた方も少なからずいらっしゃると思いますが、収穫ロボット開発の分野では、かなり高い収穫率を誇っています。今後はこの数字をさらに60%ぐらいまでこれからの1年で練り上げていきたいと考えていおります。また、日中のハウスの暑い中で人の代わりに収穫することや夜中の収穫にも使っていただけるように、さまざまな提案を今後も行っていきたいと考えています。
キュウリ収穫ロボットは、人の変わりになるロボットではなく、人と共存できる形で世の中に提案していきたいと考えております。今後も、より良い収穫ロボットの開発に取り組んでまいります。
▼関連記事
https://prtimes.jp/main/html/rd/p/000000095.000050444.html
AGRIST株式会社 概要
AGRISTはテクノロジーで農業課題を解決するスタートアップ企業です。
現在日本の農家の平均年齢は68歳となり2030年には農業従事者が半減するとされ、国内における人手不足による農業課題解決ニーズは高まっています。AGRISTは、それらの農業課題を収穫ロボットやソフトウエアの開発により、テクノロジーを活用した次世代農業を実現することで解決し、世界の食料問題の解決、全人類のウェルビーイングに貢献していきます。