
ロボットの制御技術は、日本をはじめ世界で年々伸長しています。
さらに近年、産業構造の変化にともない、新たに導入を必要とされる業界もあり、求められるニーズも常に変わり続けています。
この記事では、エンジニアを対象に、ロボット制御から見た産業用ロボットや構造、近年発展が著しい協働ロボットについてご紹介します。
産業用ロボットの構造

ロボット産業の市場動向(2019年経済産業省)
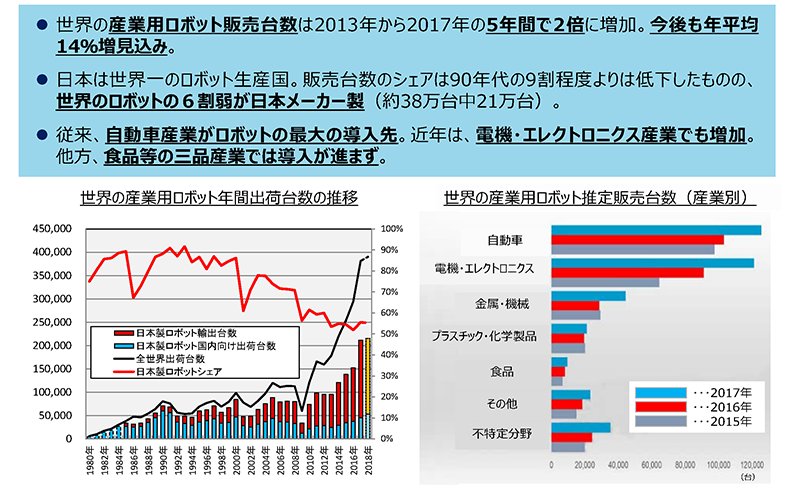
【概要】世界の産業用ロボット販売台数は2013年から2017年の5年間で2倍に増加。今後も年平均14%増見込み。
日本は世界一のロボット生産国。世界のロボットの6割弱が日本メーカー製(約38万台中21万台)。
ロボットの基本構造は人間と同じ
ロボットと人間には、共通点があります。それは骨と関節の構造です。ロボットは基本的に、骨(リンク)と関節(ジョイント)との組み合わせで造られています。ロボットアームから成る産業用ロボットは、肘や肩などの関節部分がジョイント、その間の骨部分がリンクになります。関節(ジョイント)を動かして、骨(リンク)で力を伝えることで、目的の作業を遂行します。
また産業用ロボットは、骨(リンク)や関節(ジョイント)の動かし方などで大きく6種類に分類されます。
極座標型ロボット
極座標型ロボットは初期に普及した元祖産業用ロボットです。旋回軸が中心にあり、作業するアームは上下回転と伸縮ができます。
ロボット周辺の広い範囲に先端が届くのが特徴です。
円筒座標型ロボット
一回転運動をするジョイントを最低でも一つ、直進運動のジョイントを一つ備えています。極座標型と同じくアームが伸縮するロボットですが、上下回転の伸縮ではなく、上下方向に移動するのが特徴です。
直角座標型ロボット
縦・横・高さの3方向に直交する直線的な動きをする産業ロボットです。3方向をスライドのみで往復する構造で作業範囲に対し面積が大きくなるデメリットがありますが、精度が高く搬送や検査などの作業が可能です。
垂直多関節型ロボット
人の腕のような形状をした動きの自由度が高い産業用ロボットです。現在最も普及している産業ロボットで、4~6軸の軸数が主流。最近では7軸以上のものも登場しています。ほかのロボットに比べて関節数が多く、搬送や溶接、組立まで複雑な作業をこなすことができます。
水平多関節型(スカラ型)
日本で誕生した水平方向に特化したロボットです。先端部は上下に動く関節になっていて、必ず水平方向に移動します。動かせる動作に制限はありますが、高速で操作ができ、部品の押し込み作業などに活用されています。
パラレルリンク型
並列なリンクを介して一点の動きが制御できる「パラレルメカニズム」を採用したロボットです。複数のモーターを一点に集中させるため、他の産業用ロボットに比べて精度と出力が高くなるのが特徴。ベルトコンベアから流れてくる食品や部品の選別などに利用されています。
アクチュエータとは
アクチュエータとは、ロボットの関節部分で腕を上下に動かしたり、回したりする装置のことです。身近なアクチュエータにモータがあります。
アクチュエータを利用して、アームを動かす時に加える力や角度、速さなどを人間の腕のように自由に制御できます。またロボットの関節以外にも、さまざまな用途で組み込まれています。
たとえば自動車のワイパー、ドアミラー、パワーウインドウ、昇降装置、カメラのズーム機能、リニアモーターカーなどです。
ロボットと人が一緒に働く「協働ロボット」とは?

従来の産業用ロボットと協働ロボットの違い
協働ロボットとは、人間とともに高度で柔軟な作業をするロボットのことです。
従来の産業用ロボットは、安全確保のためにロボットの周囲に安全柵を設けて隔離し、限定された作業のみします。
一方で、協働ロボットは、柵をなくして人間とロボットが空間を共有し、いっしょに作業できることを目的としたロボットです。柵が不要のため場所を多く取らず、設置場所を選びません。
製造業などで「協働ロボット」導入が加速する理由
協働ロボットは政府の規制緩和により注目を集め、製造業などでの導入が加速しています。
政府は2013年、一定の条件の下、80ワット以上の産業用ロボットと人間が、柵を設けることなく、同じ空間で作業することを認めました。日本で協働ロボット開発が加速する契機となりました。
また、ロボット制御の進化進展により、安全性が増したことも要因として上げられます。協働ロボットをより活用するためのアプリケーション開発や実装期間の短縮、効率化そしてコスト削減で、中小企業でも導入しやすい環境になりました。
協働ロボットに欠かせない、ロボットビジョン
ロボットビジョンとは、産業用ロボットに取り付ける位置の検出や検査のためのカメラが果たす役割のことです。
ロボットビジョンは、人間の目のような役割をする「カメラ(センサー)」や撮影対象を認識、判断する「画像処理システム」などで構成されています。そして、画像処理の結果に応じて、ロボットに作業内容を指示する役割までを、ロボットシステムビジョンと呼びます。
ロボットだけでは、考えて行動できませんが、ロボットビジョンならば、人間のように考え、判断しながら、より高度な作業が可能です。
協働ロボットは「人と一緒に作業ができること」が強み

「新しいロボット」だからこそ起きる、新たな課題
ロボット制御の技術進歩と柔軟な発想、創造しだいで、国内外のさまざまな課題解決が期待される協働ロボット。ゆえに、新たな課題も浮上しています。
まず、協働ロボットの対象物のほとんどは、自動車などと異なり、大きさや形、硬さが一定ではありません。従来人間の目と手を用いてきた経験値をロボット制御の技術などで解決する必要があります。
また、人間と共に作業するため、安全に動作することは必須です。
課題を解決する方法
上記の課題を解決する技術として、「力制御の進化(バイラテラル制御)」と「ai(ディープラーニング)の活用」が上げられます。
「力制御の進化」は、均一ではない対象物を認識し、安定した把持を可能にします。さらに、ロボットへのティーチングが容易です。
「ai(ディープラーニング)の活用」は、ベテラン作業者のような動きを可能にし、人間に安全で最適なロボット制御が実現可能です。
ロボット開発で農業課題に取り組むベンチャー(AGRIST)
ロボット制御技術を農業の課題に応用、取り組んでいるベンチャー企業が、「AGRIST(アグリスト)株式会社(以降「AGRIST社」)」です。
AGRIST社は、aiを搭載した農作物の自動収穫ロボットの開発に取り組んでいます。
地域の農家と連携し、安価で機能がシンプルで、ユーザーに使いやすいロボットを開発。日本でそして海外への展開を実現します。
2021年より、農産物の収穫率を高めるために、osの開発に取り組みます。ロボットに解析された画像データの情報を搭載することにより、ハードとソフトを両立させ、画像データを活用した病害虫の早期発見や環境制御を実行。最終的にはデータを活用した世界の農業課題の解決に取り組みます。
AGRIST社では、テクノロジーで農業問題を解決するロボットエンジニアを募集しています。
ロボットエンジニアとして、開発するのが好き、農業課題を解決したい、地方から世界に挑むベンチャーで経験を積みたい人は、募集内容を見て、応募してみてはいかがでしょうか。
ロボット制御は新たな産業に応用されていく
ロボット制御技術は日本だけでなく世界でも日々伸長を遂げています。
これまでにない創造性をもって性能性を高めることで農業など産業のリアルな声と向き合うことができるのではないでしょうか。
ロボット技術の活用とビジョンを、開発経験のあるエンジニアの方たちの、今後のキャリアの描き方にもつながれば幸いです。